
![Explained: Rotary Encoder [Working principle, Types, Applications, Features]](https://cdn11.bigcommerce.com/s-sgprcd6/images/stencil/1193x795/uploaded_images/rotary-encoder.jpg?t=1658209903 "Explained: Rotary Encoder [Working principle, Types, Applications, Features]")
Explained: Rotary Encoder [Working principle, Types, Applications, Features]
A rotary encoder is an electromechanical device that is used to convert an angular position or the motion of a shaft or axis into a digital or analog code, used for motion control applications. The output signal can be read by various control systems including PLCs. Control systems using the signal received from the encoder can determine the speed, direction, position, number of pulses, or other items.
The rotary encoder is a type of sensor whose function is to determine the amount of rotation of the shaft and its direction.
In industrial automation, rotary encoders are used as angle, position, speed, and acceleration sensors.
The main task of encoders is to take feedback from the environment and convert it into usable data for control systems and processors.
Using tools such as gears and conveyor belts, linear movements can also be controlled by these encoders.
Encoder Technologies
The technologies used in making the encoder are:
Conductive: A circumferential series connected to a PCB will be used to encode the information. Contact brushes sense the contact areas of the conductive zone. This form of the encoder is now rarely used.
Optical: In this technology, light is projected through a slit inside a glass or metal disk toward a light-emitting diode. This technology is one of the most common technologies and this type of encoder is very sensitive to dust.
On-Axis Magnetic: This technology typically uses a magnetized 2-pole neodymium magnet that is the same size as the motor shaft.
The accuracy of this technology is very low and can vary from a few degrees to under 1 degree. Resolutions can be as low as 1 degree or as high as 0.09 degrees and do not give us many resolution options. Due to the use of 2 pole magnets, there is a lot of distortion in the output.
Off-Axis Magnetic: This technology typically uses twisted ferrite magnets in rubber attached to a metal ball, which allows for flexibility in design and low cost for general applications.
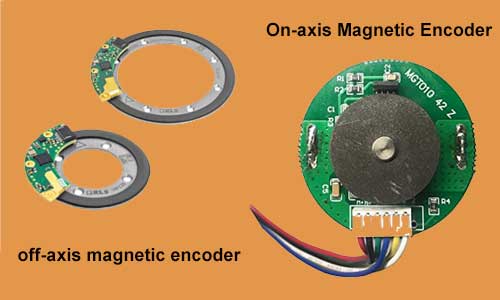
Because of the flexibility of many Off-Axis encoder chips, they can be programmed and designed to accept any number of pole widths, so the chip can be adapted to use in any application. Magnetic encoders can be used in harsh environments where optical encoders are not able to work.
Types of Rotary Encoder
There are different types of rotary encoders that are used for different applications.
Rotary encoders are divided into two main types in terms of function and output:
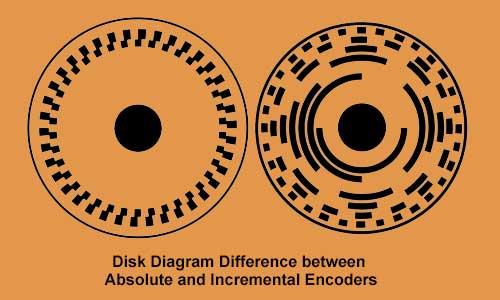
Absolute Rotary Encoders
In an absolute encoder, the position information in the encoder is retained when the power is removed from the system, and the information can be retrieved as soon as the power is reconnected and its output shows the position of the shaft at the same time.
Incremental Rotary Encoders
If the power of the system is lost the incremental encoder will start measuring from 0 when power returns and it reports changes in position but not the absolute position.
The Output of the incremental rotary encoder gives us information about the movement of the shaft, which elsewhere is converted into information such as speed, distance, and position. 360 PPR encoder or Pulses Per Revolution, 1024 PPR encoder, and 1000 PPR are some examples that represent encoder resolution.
Encoders are divided into three categories based on body structure:
- Shaft Encoders
- Hollow Shaft Encoders
- Wheel Rotary Encoder
You can check out the following link to see our wheel rotary encoder products.
And there are three types of encoders in terms of internal structure and sensing technology:
- Optical
- Magnetic
- Laser
How does the Rotary Encoder Work?
The components of the rotary encoder are:
- Electronic Boards
- Photo detector Assembly
- Code Disk
- Light Source
- Housing Assembly
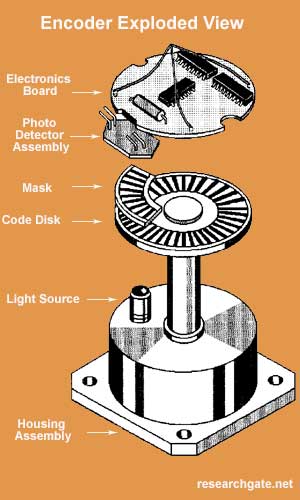
One of the main components of rotary encoders is a glass or plastic disc, which is covered one by one with transparent strips and dark strips.
There are three pins, the disc connected to Common Pin C, Pins A, and B that are connected to the rotating shaft and form a square wave by rotating and connecting to the common pin.
A light source is on one side and an optical sensor is on the other side of the disk. Simultaneously with the rotation of the shaft and the rotation of the disk, the light radiation is cut off and connects to the sensor.
Whenever light hits the sensor, the encoder generates an electrical pulse. When light is reflected by the dark part of the disk and does not reach the sensor, the signal is also cut off.
Pins A and B will start making contact with the common pin and with the continuous rotation of the disk, the two square wave output signals will be created accordingly. The number of pulses is proportional to the angle at which the disk rotates.
Features and Advantages
- Rugged and hard-wearing proper for various applications
- Low-cost feedback
- Available in standard range as well as custom versions
- Integrated electronics
- High reliable and accurate
- High resolution
- Fuses optical and digital technology
- Can be used in existing applications
- Compact size
Applications Rotary Encoder
There are different rotary encoders that are used across many different industries. Some industries which they can be used within are;
- Packaging
- Food and beverage
- Printing
- Textiles
- Mobile vehicle
- Aerospace
- Material Handling
- Robotics
- Lift Industry
- Labeling Machines
- Medical Equipment
- Drilling Machines
- Automation
- Assembly Machines
- Testing Machines
- CNC Machines
They also can be used in applications that need to monitor or control mechanical systems. Some of the more common applications for rotary encoders that we often are approached for are;
- Motor Feedback
- Cut-to-length applications
- Conveying
- Lift Industry Applications-
- Filling applications
- Robotics applications
- Ball Screw Positioning
Rotary encoders are often used to track the position of the motor shaft (in permanent magnet BRUSHLESS motors). These motors are commonly installed in CNC machines, robots, and other industrial equipment. Incremental encoders are used in inductive servo motors, but absolute encoders are used in BRUSHLESS permanent magnet motors.
Here is a Encoder article for you, if you're interested to know more about them:
Explained: Rotary Encoder [Working principle, Types, Applications, Features]
Absolute Encoder (Working Principle, Types, Applications, Advantages)
Top World-Class Rotary Encoder Brands in UAE
Recent Posts
-

Booster Pump Troubleshooting and Maintenance: How to Fix and Prevent Common Issues
1. Introduction Imagine turning on your faucet only to be greeted with a weak trickle of water when …22nd Apr 2025 -

Energy-Efficient Booster Pumps: Selection and Tips for Maximizing Performance
1. Introduction Imagine never having to deal with fluctuating water pressure, noisy pumps, or skyroc …19th Apr 2025 -

Booster Pumps for Sustainable Water Systems: Irrigation and Rainwater Harvesting Solutions
1. Introduction Water scarcity is no longer a distant threat—it’s a reality affecting millions …16th Apr 2025